
Live notebook
You can run this notebook in a live session ![]() or view it on Github.
or view it on Github.
Reference frames#
In this tutorial, we cover the reference frames most important to EBSD, chosen conventions in kikuchipy, and how they relate to conventions in the other softwares by Bruker Nano, EDAX TSL, EMsoft, and Oxford Instruments. We also test conversions between the conventions by indexing simulated patterns using Hough indexing (HI) from PyEBSDIndex.
Detector-sample geometry#
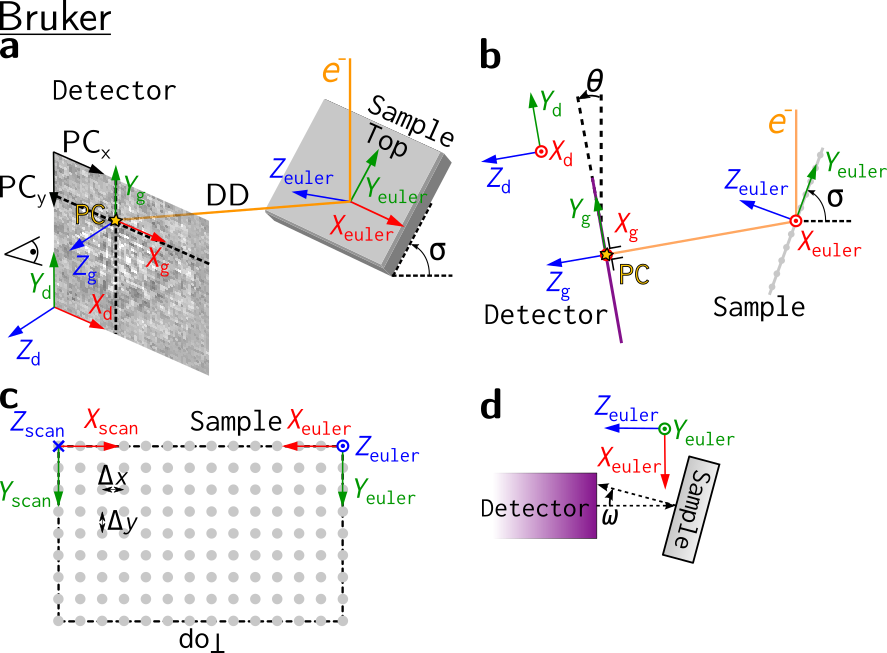
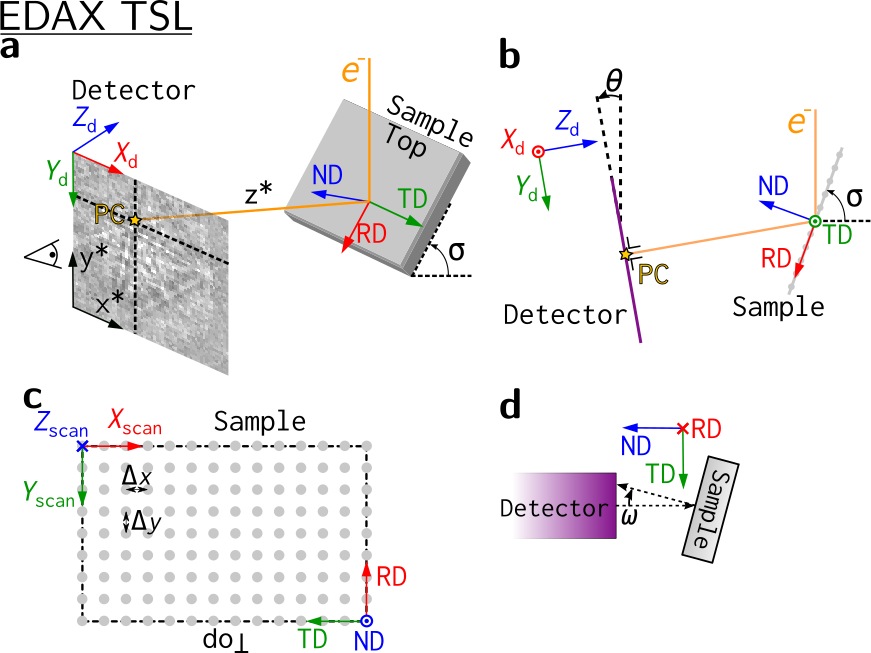
The figure below shows the sample reference frame and the detector reference frame used in kikuchipy, all of which are right handed. In short, the sample reference frame (\(X_s\), \(Y_s\), \(Z_s\)) is the one used by EDAX TSL, (RD, TD, ND), while the pattern center (\(PC_x\), \(PC_y\), \(PC_z\)) is the one used by Bruker Nano, (\(PC_x\), \(PC_y\), \(DD\)).
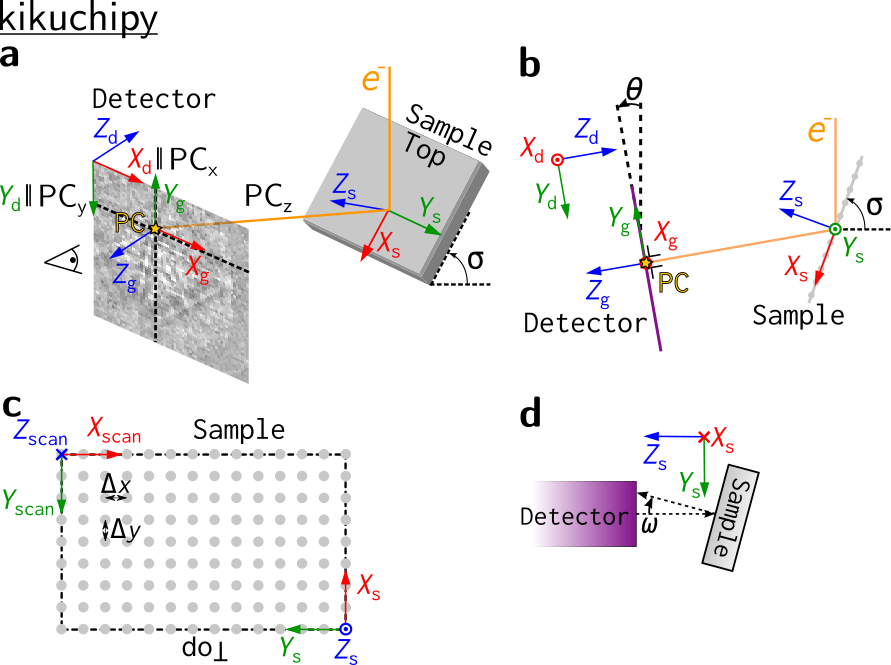
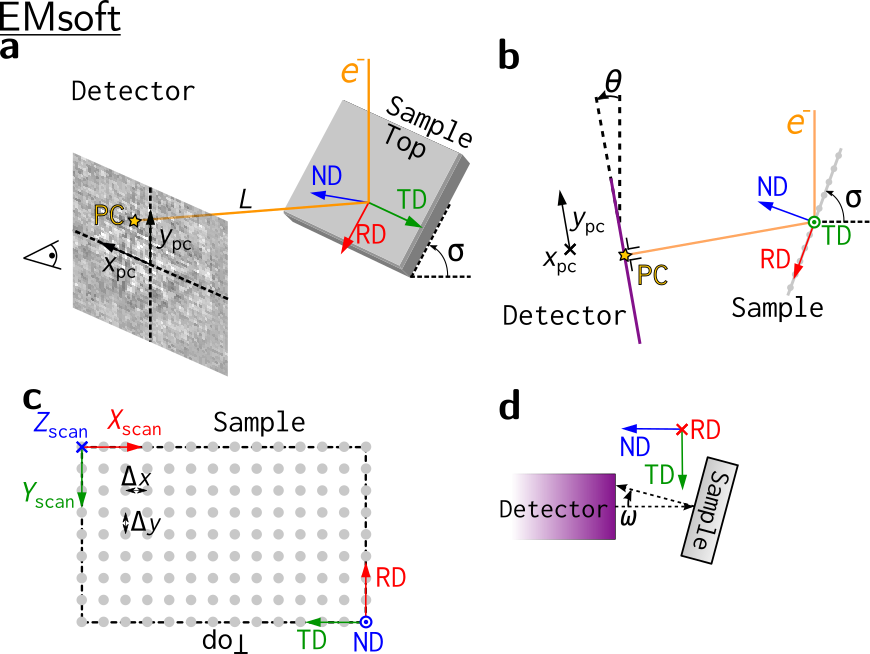
In a, the electron beam interacts with the sample in the source point. The shortest distance from this point to the detector is called the projection or pattern center (PC). A part of the Kikuchi sphere, resulting from the beam-sample interaction, is projected onto the flat detector in the gnomonic projection, constituting the EBSD pattern (EBSP). A gnomonic coordinate system \(CS_g\), (\(X_g\), \(Y_g\), \(Z_g\)) with (0, 0, 0) in the PC is defined for the detector plane. We also define a detector coordinate system \(CS_d\), (\(X_d\), \(Y_d\), \(Z_d\)) for the detector plane with (0, 0, 0) in the upper left corner. The projection center coordinates (\(PC_x\), \(PC_y\), \(PC_z\)) are defined in this detector coordinate system:
\(PC_x\) is measured from the left border of the detector in fractions of detector width.
\(PC_y\) is measured from the top border of the detector in fractions of detector height.
\(PC_z\) is the distance from the detector scintillator to the sample divided by pattern height.
Orientations are defined in the Bunge convention with respect to the sample coordinate system \(CS_s\), (\(X_s\), \(Y_s\), \(Z_s\)). The detector and sample viewed along the microscope \(X\) axis are shown in b, with the three coordinate systems and the PC also shown. The scanned map is shown in c. Note the orientation of \(CS_s\) and the sample “Top”: the map is scanned from the bottom of the sample and upwards. Three tilt angles are defined: the sample tilt \(\sigma\) shown in a and b; the detector tilt \(\theta\) shown in b; the azimuthal angle \(\omega\) which is defined as the sample tilt angle around the \(X_s\) axis, shown in a top view of the detector and sample along the microscope \(Z\) axis in d.
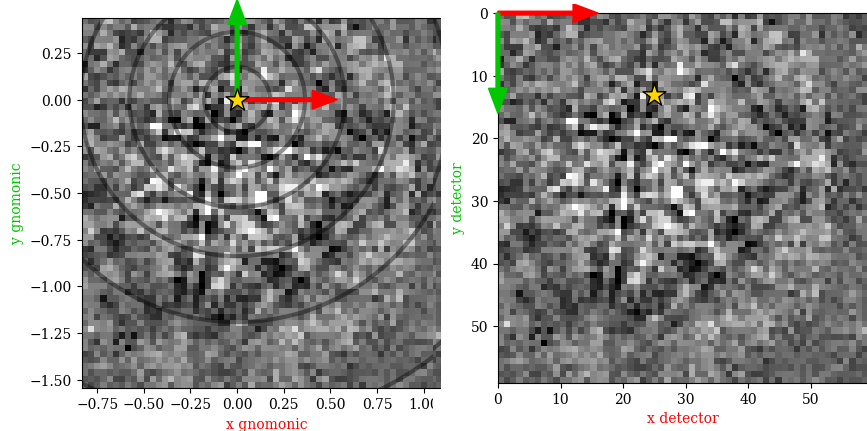
The above figure shows the EBSP in the sample reference frame figure a as viewed from behind the screen towards the sample in (left) the gnomonic coordinate system with its origin (0, 0) in the PC, and in (right) the detector coodinate system with (0, 0) in the upper left pixel. The circles indicate the angular distance from the PC in steps of \(10^{\circ}\).
The EBSD detector#
All relevant parameters for the detector-sample geometry are stored in an EBSDDetector instance. Let’s first import necessary libraries and a small Nickel EBSD test data set
[1]:
# Exchange inline for notebook or qt5 (from pyqt) for interactive plotting
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import kikuchipy as kp
from orix.quaternion import Orientation, Rotation
from orix.vector import Vector3d
plt.rcParams["figure.figsize"] = (15, 5)
[2]:
# Use kp.load("data.h5") to load your own data
s = kp.data.nickel_ebsd_small()
s
[2]:
<EBSD, title: patterns Scan 1, dimensions: (3, 3|60, 60)>
Then we can define a detector with the same parameters as the one used to acquire the small nickel data set
[3]:
det = kp.detectors.EBSDDetector(
shape=s.axes_manager.signal_shape[::-1],
pc=[0.4221, 0.2179, 0.4954],
px_size=70, # Microns
binning=8,
tilt=0,
sample_tilt=70,
)
det
[3]:
EBSDDetector
shape (Ny, Nx): (60, 60)
pc (PCx, PCy, PCz): (0.422, 0.218, 0.495)
sample_tilt: 70.0°
tilt: 0.0°
azimuthal: 0.0°
twist: 0.0°
binning: 8
px_size: 70.0 um
[4]:
det.pc_tsl()
[4]:
array([[0.4221, 0.7821, 0.4954]])
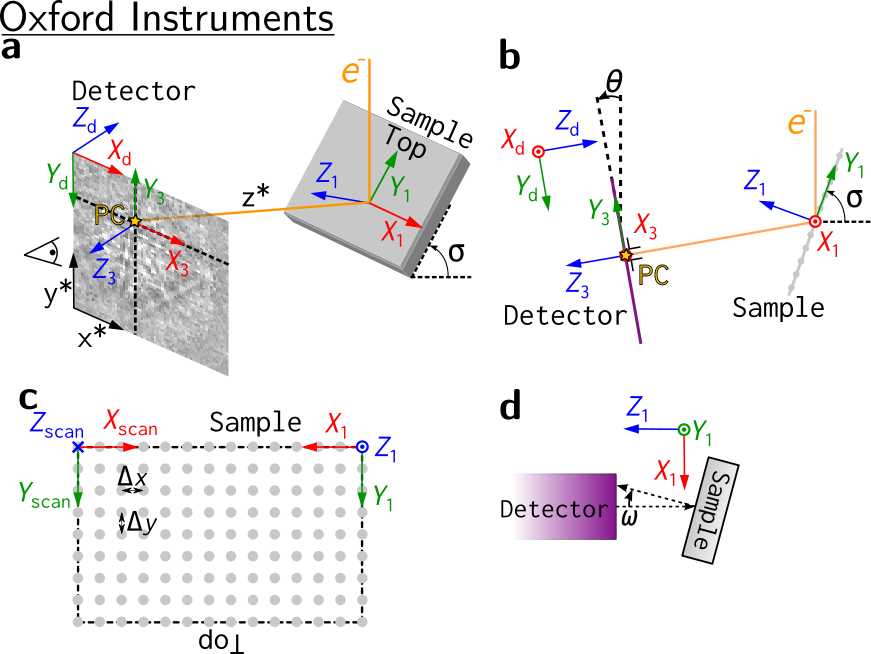
Above, the PC was passed in the Bruker convention. Passing the PC in the EDAX TSL, Oxford, or EMsoft convention is also supported. The definitions of the conventions are given in the EBSDDetector API reference, together with the conversion from PC coordinates in the EDAX TSL, Oxford, or EMsoft conventions to PC coordinates in the Bruker convention.
The PC coordinates in the EDAX TSL, Oxford, or EMsoft conventions can be retreived via EBSDDetector.pc_tsl(), EBSDDetector.pc_oxford(), and EBSDDetector.pc_emsoft(), respectively. The latter requires the unbinned detector pixel size in microns and the detector binning to be given upon initialization.
[5]:
det.pc_emsoft()
[5]:
array([[ 37.392, 135.408, 16645.44 ]])
The detector can be plotted to show whether the average PC is placed as expected using EBSDDetector.plot() (see its docstring for a complete explanation of its parameters)
[6]:
det.plot(pattern=s.inav[0, 0].data)
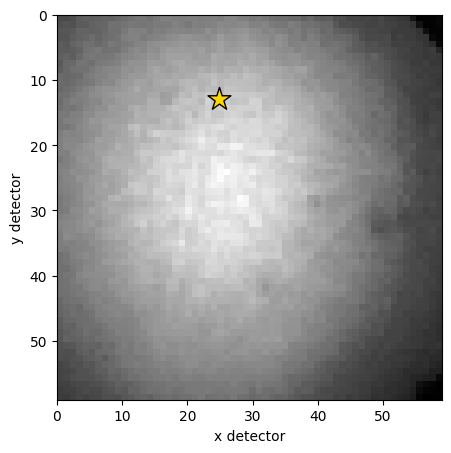
This will produce a figure similar to the right panel in the detector coordinates figure above, without the arrows and colored labels.
Multiple PCs with a 1D or 2D navigation shape can be passed to the pc parameter upon initialization, or they can be set directly. This gives the detector a navigation shape (not to be confused with the detector shape) and a navigation dimension (maximum of two)
[7]:
det.pc = np.ones([3, 4, 3]) * det.pc
det.navigation_shape
[7]:
(3, 4)
[8]:
det.navigation_dimension
[8]:
2
[9]:
det.navigation_size
[9]:
12
[10]:
det.pc = det.pc[0, 0]
det.navigation_shape
[10]:
(1,)
Note
The offset and scale of HyperSpy’s axes_manager is fixed for a signal. This restricts us from letting the PC vary with scan position if we want to calibrate the EBSD detector via the axes_manager. The need for a varying PC was the main motivation for the EBSDDetector class.
The left panel in the detector coordinates figure above shows the detector plotted in the gnomonic projection using EBSDDetector.plot(). The 2D gnomonic coordinates (\(x_g, y_g\)) in \(CS_g\) are defined in \(CS_d\) are
The detector bounds and pixel scale in this projection, per navigation point, are stored with the detector
[11]:
det.bounds
[11]:
array([ 0, 59, 0, 59])
[12]:
det.gnomonic_bounds
[12]:
array([[-0.85203876, 1.1665321 , -1.57872426, 0.43984659]])
[13]:
det.x_range
[13]:
array([[-0.85203876, 1.1665321 ]])
[14]:
det.r_max # Greatest radial distance to PC
[14]:
array([[1.96294866]])
Other software’s reference frames#
Other software use other reference frames. To aid in the conversion of orientations between softwares, the reference frames used in other softwares are also shown here. They represented to the best of the contributors understanding.
Warning
Reference frames used in other softwares given here are based on instruction manuals from the internet. Use with care, and double check whenever possible.
EMsoft#
Bruker#
EDAX TSL#
Oxford Instruments#
Test PC conventions with PyEBSDIndex#
We can test the PC conventions using Hough indexing in PyEBSDIndex. We will use ten dynamically simulated nickel patterns with a fixed PC and random orientations. We check for consistency by passing the PC in all the conventions described above when indexing, and making sure that the indexed orientations are rotated so that they are defined with respect to the same sample reference frame (the one used in kikuchipy, EDAX TSL and EMsoft).
Note
PyEBSDIndex is an optional dependency of kikuchipy, and can be installed with both pip and conda (from conda-forge). To install PyEBSDIndex, see their installation instructions.
Load master pattern in the square Lambert projection
[15]:
mp = kp.data.nickel_ebsd_master_pattern_small(
projection="lambert", hemisphere="upper"
)
Define a rectangular EBSD detector to project simulated patterns onto
[16]:
det2 = kp.detectors.EBSDDetector(
(100, 120), pc=(0.4, 0.2, 0.5), sample_tilt=70
)
det2
[16]:
EBSDDetector
shape (Ny, Nx): (100, 120)
pc (PCx, PCy, PCz): (0.4, 0.2, 0.5)
sample_tilt: 70.0°
tilt: 0.0°
azimuthal: 0.0°
twist: 0.0°
binning: 1
px_size: 1.0 um
Create ten random orientations
[17]:
R = Rotation.random(10)
Or = Orientation(R, mp.phase.point_group)
Project patterns onto detector
[########################################] | 100% Completed | 107.94 ms
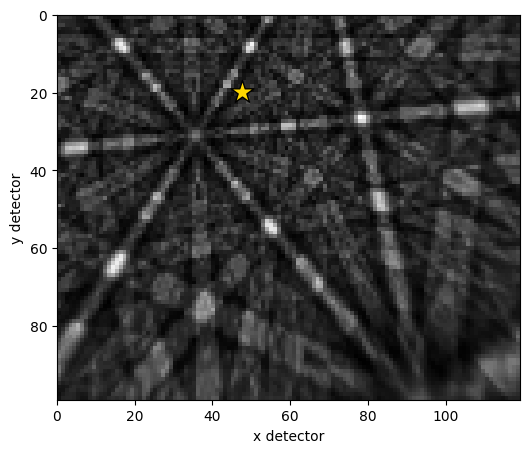
Plot the first simulated pattern and the PC
[19]:
det2.plot(pattern=s2.inav[0].data)
Load necessary PyEBSDIndex modules for Hough indexing
[20]:
from pyebsdindex import ebsd_index
For the various softwares, define the PCs and the transformations bringing the indexed orientations returned from PyEBSDIndex back to the sample reference frame used in kikuchipy, EDAX TSL, and EMsoft
[21]:
pcs = {
"KIKUCHIPY": det2.pc,
"BRUKER": det2.pc,
"EDAX": det2.pc_tsl(),
"OXFORD": det2.pc_oxford(),
"EMSOFT": det2.pc_emsoft(),
}
R_sample = {
"KIKUCHIPY": Rotation.identity(),
"BRUKER": Rotation.from_axes_angles([0, 0, 1], -np.pi / 2),
"EDAX": Rotation.identity(),
"OXFORD": Rotation.from_axes_angles([0, 0, 1], -np.pi / 2),
"EMSOFT": Rotation.identity(),
}
# Some wrangling to display a nice table
for softw, pc_i in pcs.items():
print(
f"{softw:<9} {pc_i[0, 0]:>6.3f} {pc_i[0, 1]:>6.3f} {pc_i[0, 2]:>6.3f}"
)
KIKUCHIPY 0.400 0.200 0.500
BRUKER 0.400 0.200 0.500
EDAX 0.400 0.800 0.500
OXFORD 0.400 0.667 0.417
EMSOFT 12.000 30.000 50.000
Then we do the following in a loop:
Initialize a PyEBSDIndex indexer, specifying the vendor and vendor specific PC
Index the ten patterns
Apply vendor specific conversion to the returned orientations
Print misorientation angle between indexed orientations and ground truth orientations
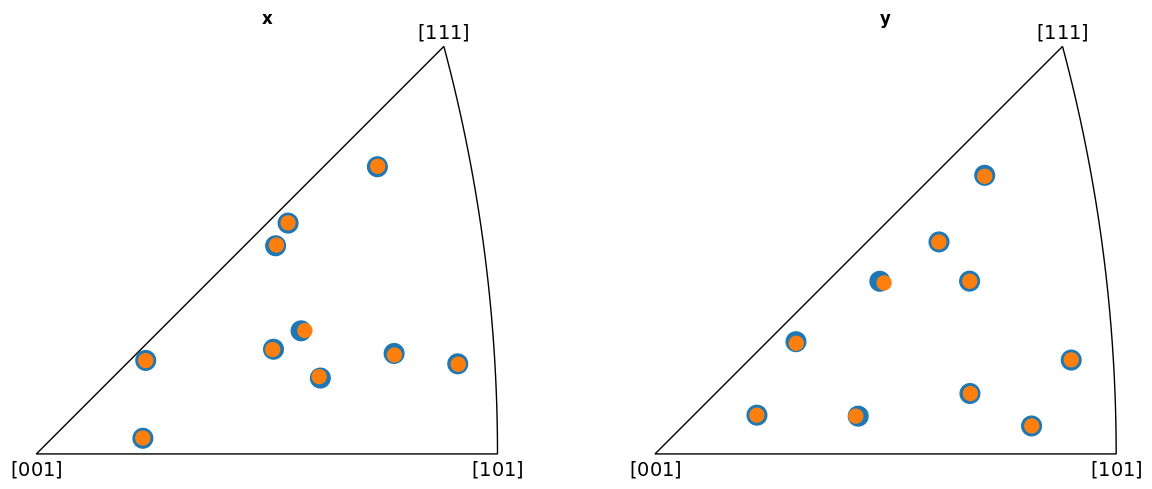
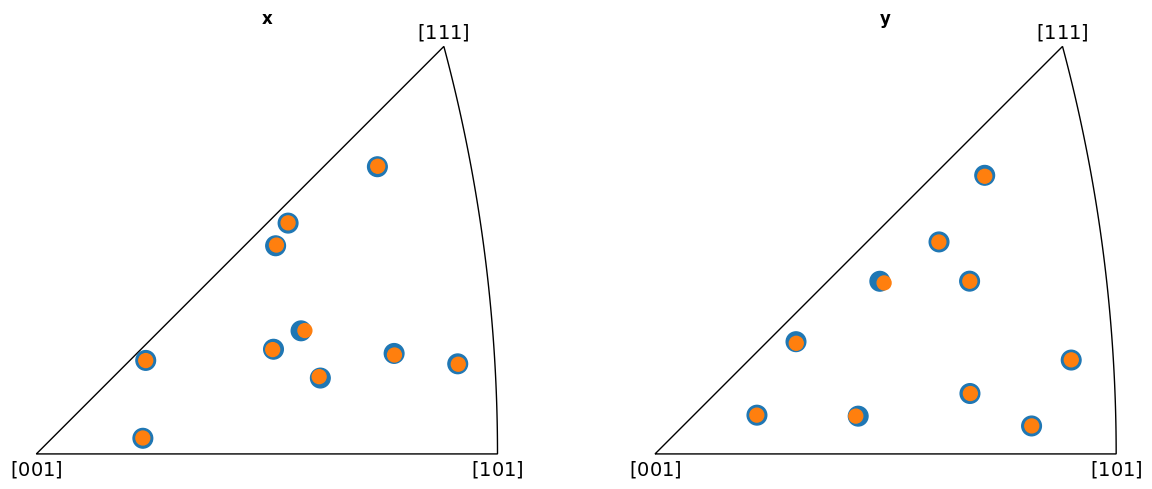
Plot the indexed orientations and the ground truth in inverse pole figures (IPFs)
[22]:
v_sample = Vector3d([(1, 0, 0), (0, 1, 0)])
for vendor, pc in pcs.items():
print(vendor)
if vendor == "EMSOFT":
# PyEBSDIndex requires the pixel size to be passed as the forth PC
# value in order to correctly scale the L (PCz) parameter to obtain the
# PC used internally in PyEBSDIndex
pc = np.append(pc, [1])
indexer = ebsd_index.EBSDIndexer(
vendor=vendor,
PC=pc,
sampleTilt=det2.sample_tilt,
camElev=det2.tilt,
patDim=det2.shape,
)
data, *_ = indexer.index_pats(s2.data)
R_hi = Rotation(data[0]["quat"]) * R_sample[vendor]
Or_hi = Orientation(R_hi, mp.phase.point_group)
print(
f"Average misorientation angle to ground truth: {Or_hi.angle_with(Or, degrees=True).mean():.4f}"
)
fig = Or.scatter(
"ipf",
direction=v_sample,
c="C0",
s=200,
return_figure=True,
)
Or_hi.scatter("ipf", figure=fig, c="C1", s=100)
plt.pause(0.5) # Show IPFs before continuing with next vendor
KIKUCHIPY
Average misorientation angle to ground truth: 0.0651
BRUKER
Average misorientation angle to ground truth: 0.0651
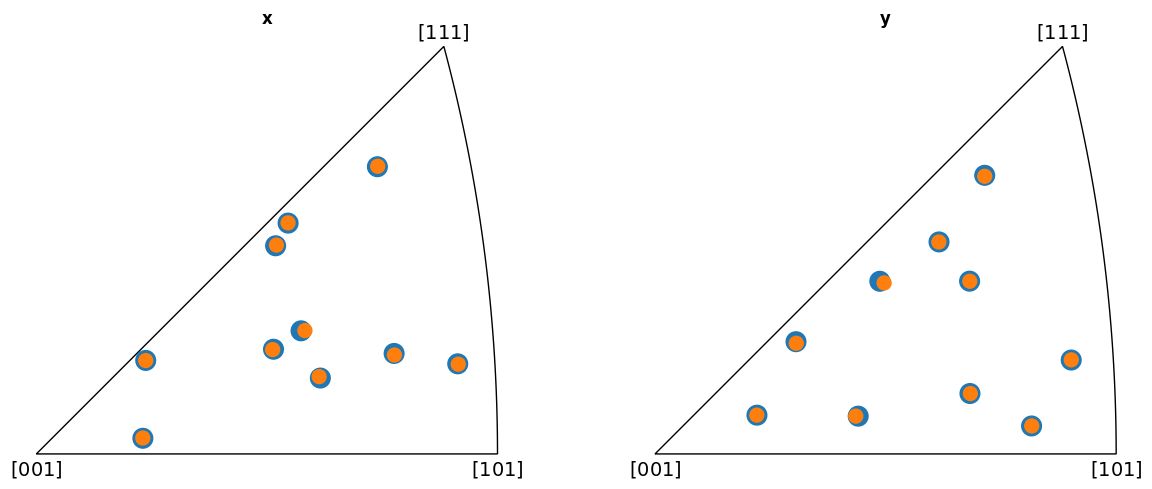
EDAX
Average misorientation angle to ground truth: 0.0651
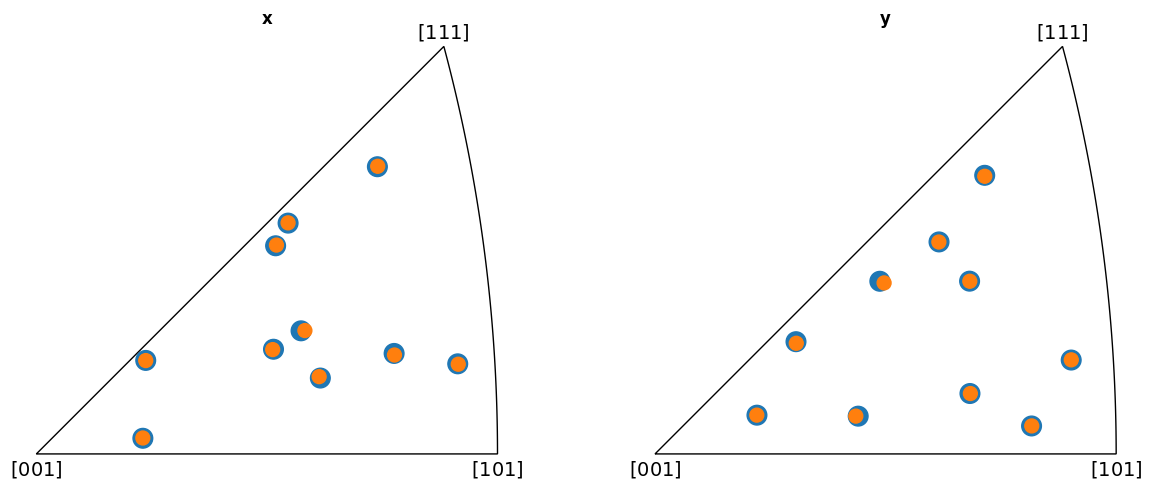
OXFORD
Average misorientation angle to ground truth: 0.0651
EMSOFT
Average misorientation angle to ground truth: 0.0651
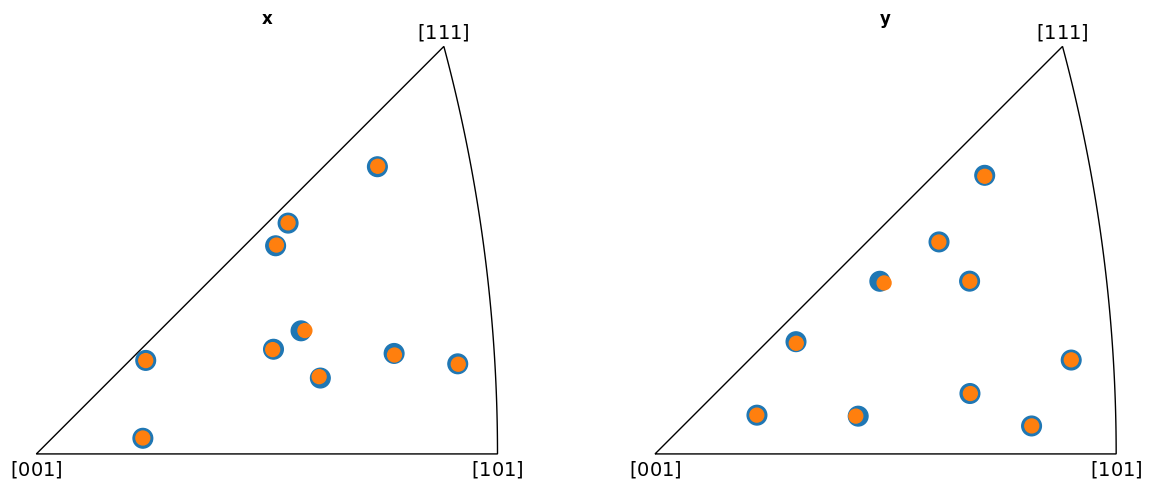
From the IPFs, we see that all indexed orientations for all vendors are close to the ground truth orientations, with an average misorientation angle below 0.5\(^{\circ}\). This confirms that the PC conventions for the various vendors are consistent and that PyEBSDIndex is consistent with kikuchipy.